
Otonom araçlar, yüksek düzeyde güvenlik ve konfor sağlamak için gelişmiş sürücü destek sistemlerine (ADAS) güvendiklerinden, tartışmalı ve ilgi çekici bir konudur. Her ne kadar tam otonom sürüş özelliğine sahip otomobiller henüz mevcut olmasa da, günümüz teknolojileri otomatik direksiyon, kendi kendine park etme gibi fonksiyonları mümkün kılıyor.
Bu arabalar, çeşitli sensörlere dayanarak çevrelerini analiz etmek ve akıllı kararlar almak için gelişmiş bilgisayar görüş sistemleri kullanıyor. Bu yazıda, bilgisayarlı görüşün temellerini ve otonom sürüşün etkinliğini nasıl artırdığını, ayrıca bu alanda beklenen zorlukları ve gelecekte ortaya çıkabilecek yenilikleri ele alacağız.

Bilgisayarlı görüş nedir?
Bilgisayarlı görüş, makinelerin çevrelerindeki nesneleri görmelerini ve tanımalarını sağlayan bir teknolojidir. Robotlar ve araçlar gibi otonom makinelerde görüş odaklı nesne tespitinin endüstriyel uygulamalarına odaklanan görüş biliminin bir alt kümesidir.
Günümüzün bilgisayarlı görüşü, çeşitli koşullardaki nesneleri doğru bir şekilde tanımlayabilen sağlam, iyi genelleştirilmiş modeller oluşturmak için evrişimli sinir ağları (CNN'ler) gibi derin öğrenme yapay zeka algoritmalarını kullanır. Üretim, tarım, robotik ve otomotiv gibi daha yüksek güvenilirlik gerektiren çeşitli görevlerde makine görüşünün uygulanmasını mümkün kılıyor.
Otonom araçlarda bilgisayarlı görüş nasıl çalışıyor?
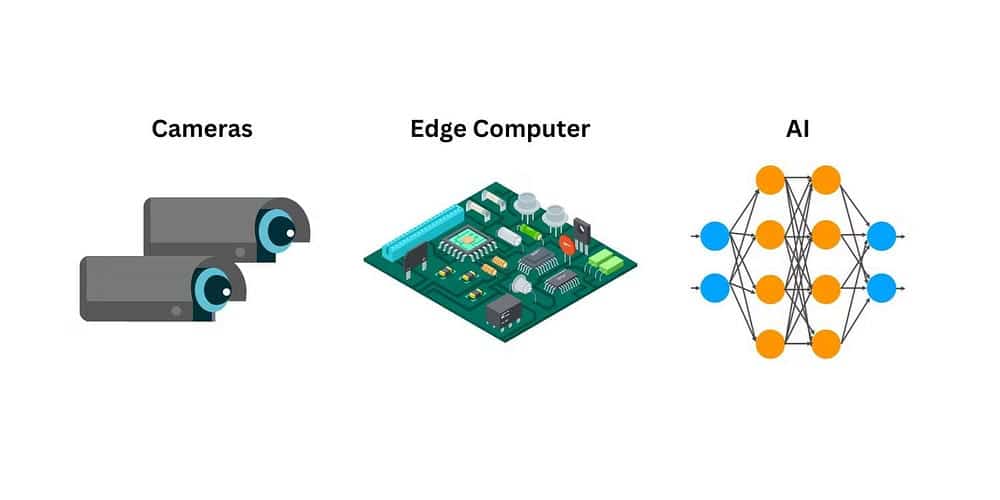
Otonom araçlardaki bilgisayarlı görüş genel olarak üç bölümden oluşuyor: kamera sistemi, işlemci (edge computing) ve yapay zeka. Bu teknoloji paketi, otonom araçların sürüş sırasında farklı işaretleri ve engelleri görmesini, değerlendirmesini ve tanımlamasını sağlıyor. Bu teknolojilerin otonom bir araba için makine görüşü oluşturmak üzere nasıl bir araya geldiğini anlamak için her bir bölümü derinlemesine ele alalım.
Kamera sistemi
Bilgisayarlı görüş, çevre hakkında görsel bilgi toplamak için kamera sistemlerinden yararlanır. Otonom araçlar, mümkün olduğunca fazla görsel bilgi toplamak için aracın etrafına yerleştirilen çok sayıda kameradan yararlanıyor.
Yapay görme kameralarında iki ana sensör kullanılır: tamamlayıcı metal oksit yarı iletken (CMOS) ve yük bağlantılı cihazlar (CCD). Sürücüsüz otomobiller için CMOS teknolojisi, hızlı okuma hızı, güçlü elektroniği ve paralel işleme yetenekleri nedeniyle sıklıkla tercih ediliyor ve bu da onu en hızlı sensör yapıyor. Farklı aydınlatma modları, dijital gece görüşü ve filtreler gibi çözümler, ideal olmayan aydınlatma koşullarında CMOS sensörüne yardımcı olabilir.
Sürücüsüz otomobillerde, stereoskopik bir görüntü oluşturmak için kameralar birbirinden belirli mesafelere kurulur. Stereoskopik görme, nesnelerde ve çevrede derinlik veya üç boyutluluk hissi yaratarak iki veya daha fazla görsel girdiyi birleştirme yeteneğidir. Bu da arabaların nesne ile araba arasındaki yaklaşık mesafeyi üçgenlemesine ve hesaplamasına olanak tanır.
İnsanın iki gözü olduğundan stereoskopik görüşten de faydalanırız. Bu vizyonu kendiniz de deneyebilirsiniz; Bir gözünüzü kapatın ve masanızdan küçük bir nesne seçin. Elinizi nesnenin yan tarafına koyun ve nesnenin ucunun en az beş santim uzakta olduğundan emin olun. Birkaç saniye durup, tahmininizde ne kadar kendinize güvendiğinizi fark edin. Şimdi iki gözünüzü de açmayı deneyin ve derinlik hissinizin ne kadar geliştiğini görün.
Kenar bilişim
Edge computing, bilgi depolama ve bilgi işlem gücünü, bu verileri üreten cihaza ve bu verilerle etkileşim kuran kullanıcılara yakınlaştırma sürecidir. Geleneksel olarak uygulamalar, sensörler ve akıllı telefonlar gibi akıllı cihazlardan gelen verileri işlenmek üzere merkezi bir veri merkezine iletirdi. Ancak verinin eşi benzeri görülmemiş karmaşıklığı ve hacmi, ağın kapasitesini aştı. Edge computing sistemleri, işlem yeteneklerini kullanıcılara ve cihazlara daha yakın hale getirerek uygulama performansını önemli ölçüde iyileştiriyor, ağ bant genişliği gereksinimlerini azaltıyor ve daha hızlı, gerçek zamanlı içgörüler sağlıyor.
Otonom araçtaki kamera sistemi veri toplarken, araç içi bilgisayar (kenar işlemci) tüm girdileri gerçek zamanlı olarak işleyerek sistemin ortam durumuyla ilgili anında bilgi sahibi olmasını sağlayacak. Tipik bilgisayarlı görüş görevleri bulut bilişim kullanılarak para tasarrufu sağlayabilse de, makine görüşü gereksinimleri için sürecin dış kaynak kullanımı yoluyla yürütülmesi durumunda bile, otonom araçların buluta bağlanması çok fazla risk barındırıyor.
Giriş verilerinin işlenmesinde gelişmiş bir bilgisayar kullanılması gecikme sorunlarını ortadan kaldırır ve verilerin gerçek zamanlı olarak alınmasını, işlenmesini ve iletilmesini sağlar. Otonom araçlar için geliştirilen gelişmiş bilgisayarlar, NVIDIA'nın Tensor Core ve CUDA Core gibi yapay zeka grafik işlemcilerini entegre eden özel bilgisayarlar kullanıyor.
Yapay zeka algoritmaları
Algoritmalar her zaman makine görüşünün önemli bir parçası olmuştur. Algoritma, bilgisayarın kamera sistemi tarafından sağlanan tüm desenleri, şekilleri ve renkleri tanımasını sağlar. Geleneksel bilgisayar görüş algoritmaları yerine yapay zekanın kullanılması, otonom bir aracın nesneleri, sokak tabelalarını, yol işaretlerini ve trafik ışıklarını güvenilir bir şekilde tanımlama yeteneğini büyük ölçüde artırır. Otonom araçların eğitilmesinde pek çok yapay zeka algoritması kullanılıyor. En popülerleri şunlardır:
- YOLO (Yalnızca Bir Kez Bakarsınız): Aracın görüş alanındaki nesneleri tanımlayan ve izleyen gerçek zamanlı bir nesne algılama algoritması.
- ELEMEK (Ölçek-Icar'ın Özel Özellik Dönüşümü): Özellikleri çıkarmak için kullanıldığında, otomobilin çevresindeki belirgin yer işaretlerini ve nesneleri tanımasına yardımcı olur.
- Yönlendirilmiş degradelerin histogramı (HOG): Nesne tanıma için kullanılır ve görüntülerden yerel desenler ve degradeler çıkarmaya odaklanır.
- TextonBoost: Ortamdaki dokuları analiz ederek nesnelerin tanımlanmasına yardımcı olan bir algoritma.
- AdaBoost: Verileri sınıflandırmak için kullanılan AdaBoost, bir aracın yolundaki nesneler ve engeller hakkında sağlam kararlar vermek için birkaç zayıf sınıflandırıcıyı birleştirir.
Otonom araçlarda bilgisayarlı görüşün önemi
Bilgisayarlı görüş, otonom bir aracın çevresini algılamasının ve anlamasının temel yoludur. Makine görüşü olmadan, otonom araçlar muhtemelen araç özerkliği ölçeğinde Seviye 1'e düşecek ve asla tam özerkliğe ulaşamayabilir.
Yapay görme sayesinde sürücüsüz arabalar artık nesneleri sınıflandırabiliyor, şeritleri ve sinyalleri tespit edebiliyor, işaretleri tanımlayabiliyor ve trafiği tanıyabiliyor.
Günümüzde birçok otonom araç LIDAR, RADAR ve SONAR gibi çeşitli sensörler kullansa da, hepsi çevreyi görmek, nesneleri tanımlamak ve yol işaretleri ile trafik sinyallerinin anlamını anlamak için büyük ölçüde bilgisayar görüşüne güveniyor. Tüm bu ek sensörler yalnızca makine görüşünü geliştirmek ve insanların, hayvanların ve malların güvenliğini artırmak için vardır.
Ancak makine görüşü, otomatik kontrol yetenekleri sağlamak için diğer sensörlerin yardımı olmadan otonom olarak çalışabilir. Aslında Tesla'nın en son sürücüsüz arabaları radar sistemini terk etti ve artık yalnızca Otopilot sisteminin makine görüşüne güveniyor.
Bu durum, diğer algılama teknolojilerinin yararlılığını sorgulamayı gerektirmese de, otonom araçlarda bilgisayarlı görüşün önemini ve gücünü ortaya koyuyor.
Sık sorulan sorular
S1. Bilgisayarlı görme teknolojisi nedir? Otonom araçlarda mı?
Bilgisayarlı görüş teknolojisi, otonom araçların çevrelerini tanımalarını ve sürüş esnasında kararlar alabilmelerini sağlamak amacıyla görüntü ve videoları analiz eden ve yorumlayan donanım ve yazılım tabanlı bir sistemdir.
S2. Bilgisayarlı görüş teknolojisi nasıl çalışır? Arabalarda mı?
Araç, çevresinden görüntü ve video çeken birden fazla kamera ve sensörle donatılmıştır. Bu veriler, görüntüleri analiz etmek ve yoldaki farklı nesneleri ve yer işaretlerini tanımak için gelişmiş yazılım kullanılarak işlenir.
S3. Bilgisayarlı görme teknolojisinin önemi nedir? Otonom sürüşte mi?
Bilgisayarlı görüş teknolojisi, otonom sürüş için olmazsa olmazdır; trafik işaretlerini, diğer araçları ve yoldaki engelleri tanıma olanağı sağlar. Bu canlı bilgiler, araç yönlendirme ve kaza önleme gibi otomatik karar alma süreçlerinin temelini oluşturuyor.
S4. Yapay görme teknolojisinin karşılaştığı zorluklar nelerdir?
Bilgisayarlı görüş teknolojisinin karşılaştığı zorluklar arasında sis ve yağmur gibi olumsuz hava koşulları, tam karanlıkta nesnelerin tanınmasında zorluk, veri koruması ve gizlilik gibi faktörler yer alıyor.
S5. Bu alanda gelecekte beklenen gelişmeler nelerdir?
Yapay zekanın daha iyi uygulamaları ve gelişmiş algılama ve görüntü tanıma yetenekleriyle bilgisayarlı görüş teknolojisinin gelişmeye devam etmesi bekleniyor. Bu teknolojinin otomobil dışındaki alanlara da yaygınlaştırılması mümkün.
Kendi kendine giden arabalarda makine görüşünün geleceği
Bilgisayarlı görüş, otonom araçların temelini oluşturur. Makine görüşü sayesinde arabalar tıpkı insanlar gibi çevreyi görüp algılayabiliyor. Hala bazı zorluklar olsa da, bilgisayarlı görüşün güvenlik ve navigasyon açısından sağladığı faydalar hafife alınamaz. Otonom araçların geleceğine gelince, yapay zeka, uç bilişim ve/veya kamera teknolojisindeki herhangi bir ilerleme otonom araçları daha verimli hale getirecek ve muhtemelen onları daha yüksek bir otomasyon seviyesine taşıyacaktır.
Yoruma kapalı.